20. 11. 2018 se konal již 6. ročník soutěže Merkur perFEKT Challenge, kterou pořádá Fakulta elektrotechniky a komunikačních technologií (FEKT), VUT v Brně. Soutěž je určena pro čtyřčlenné středoškolské týmy, které baví technika, rádi programují, bastlí a staví ze stavebnice Merkur. Z naší školy se zúčastnily dva čtyřčlenné týmy.
Tým s názvem Poslední příchozí v kategorii Svalem na robota se umístil na 1. místě a postoupil do superfinále, které se bude konat v lednu 2019.
Tým Bastláci se v kategorii Pásovec řízený barevnými značkami na dráze umístil na děleném 4. až 6. místě.
Svalem na robota
Z připravených komponent realizujte robotické vozidlo, které bude možné řídit pomocí svalu na holeni (anterior tibialis), popřípadě i jiným, tak aby mohlo projet navrženou dráhu. Pro stavbu vozidla máte k dispozici stavebnici Merkur pásový podvozek se dvěma motory, střední stavebnici Merkur, Arduino Uno s motor shieldem pro řízení, dva moduly s EMG zesilovači, a elektrody. Jednotlivé týmy budou soutěžit v projetí vytyčené dráhy na čas. Hodnotit se bude kvalita mechanického sestavení, způsob zpracování EOG signálu a rovněž konečný čas na dráze. Jednotlivé týmy budou soutěžit v projetí vytyčené dráhy na čas. Hodnotit se bude kvalita mechanického sestavení, způsob zpracování EOG signálu a rovněž konečný čas na dráze.
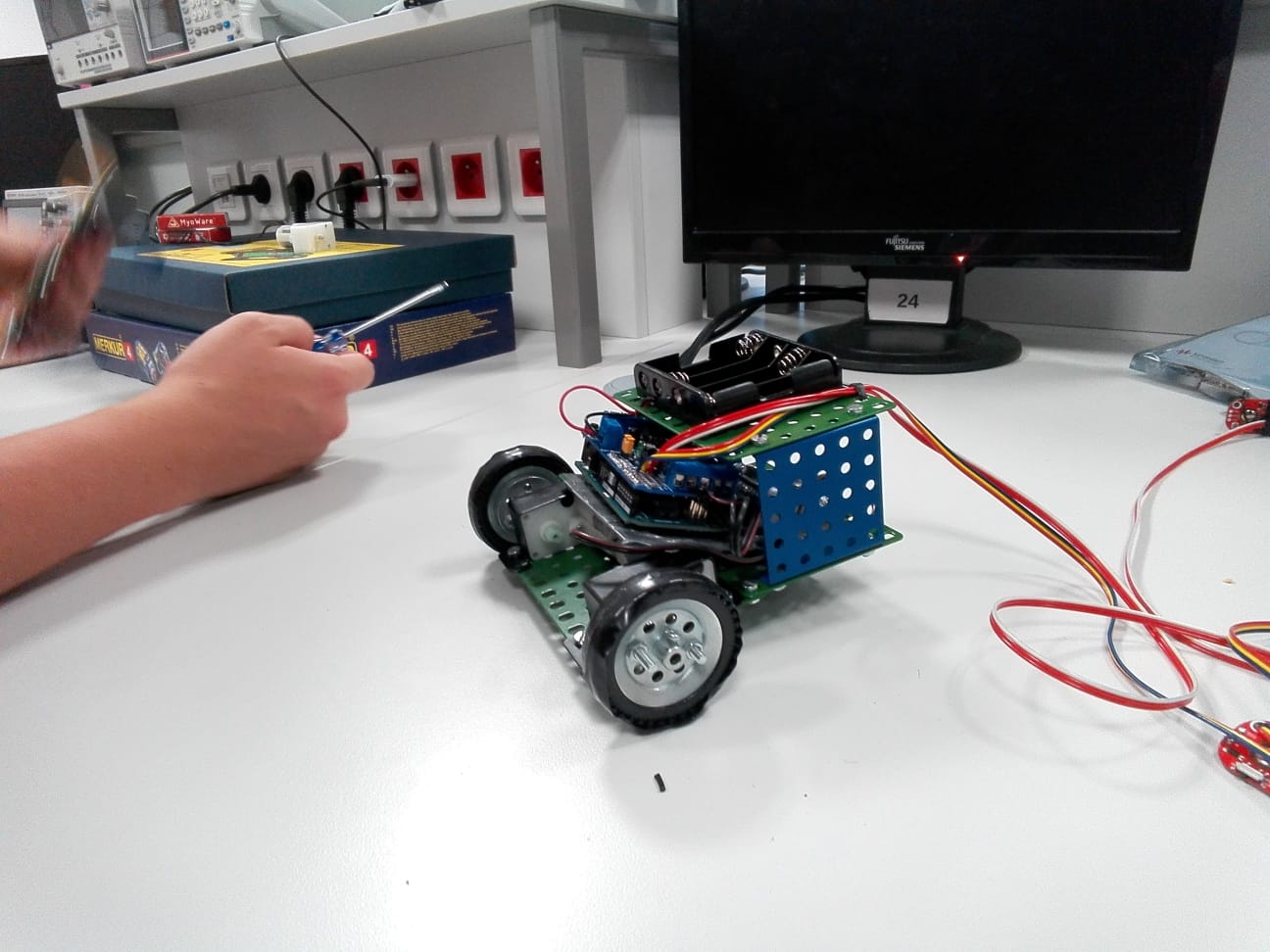
Pásovec řízený barevnými značkami na dráze
Úkolem týmu je sestavit model pásového vozidla (pásovce) se dvěma DC motory, implementovat patřičné kódy do připravené elektroniky a pásovce rozhýbat. Pásovec bude mít ve své přední části nainstalovaný detektor překážek a na spodní části podvozku detektor barev s přisvícením. Při přiblížení se k překážce (zeď) na vzdálenost menší než 10 cm zkontroluje zabarvení podlahy: V případě, že podlaha bude černá, otočí se o 90° doprava, v případě, že podlaha bude bílá, otočí se o 90° doleva, v ostatních případech se otočí o 180°. Po otočení se pásovec opět rozjede.
Pro soutěžící bude sestavena krátká dráha testující funkčnost pásovce. Pořadí soutěžících bude sestaveno na základě následujících kritérií:
Čas strávený na sestavení a zprovoznění robota.
Bezchybné projetí dráhy.
Čas potřebný k projetí dráhy.
Ing. Vladimír Křivka, Ph.D.